Project Description
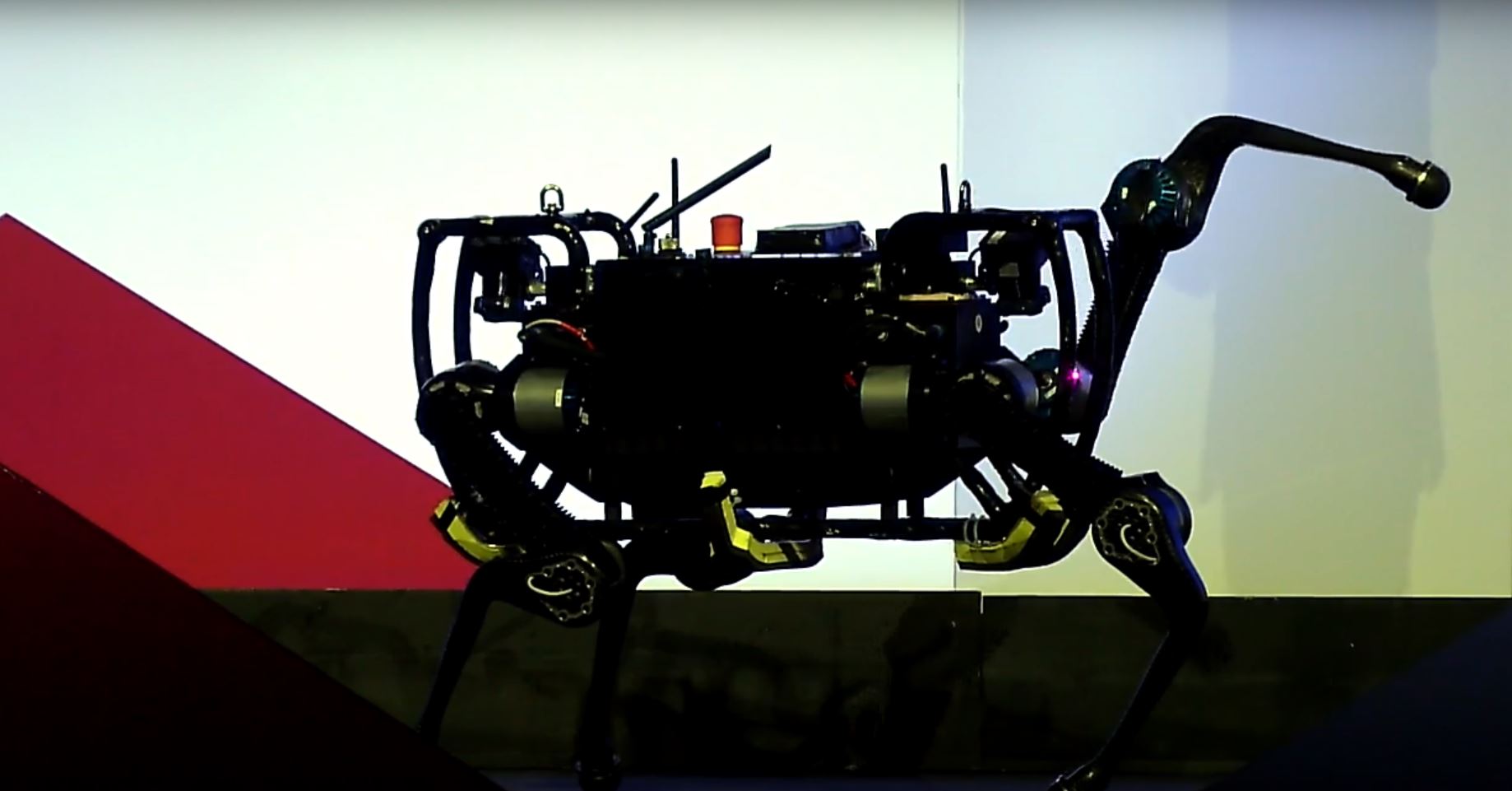
Am 11. Swiss Innovation Forum (SIF) in Basel werden u.a. die neuesten Erkenntnisse aus der Roboterforschung präsentiert. Nach zweijähriger Entwicklungsphase ist ein neuartiger Laufroboter entstanden, der auf vier Beinen unterwegs ist und über ein beachtliches Bewegungsspektrum verfügt. „Die größte Schwierigkeit gegenüber einem Roboter auf Rädern oder auf Ketten liegt darin, dass unser Laufroboter sich selbst ausbalancieren muss“, wie Professor Dr. Marco Hutter erklärt. Zusammen mit Roland Siegwart leiten die beiden Maschinenbauer verschiedene Forschungsgruppen im Bereich Robotik an der ETH Zürich. Hutters Forschung fokussiert auf Laufroboter, mobile Manipulation sowie digitale Fabrikation. Welche Fähigkeiten dieser neuartige Roboter besitzt und wo es mögliche Anwendungsgebiete es für ihn geben könnte, das erfahren Sie in der Video-Reportage.





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Hinterlasse einen Kommentar